As far as control is concerned, in order to be autonomous, a mobile robot must be able to answer some fundamental questions: Where am I? Where have I been? How can I get to my destination? These questions are part of the high-level control logic and are closely related to the perception of the environment. The low level, on the other hand, takes into account the kinematics and dynamics of the vehicle in order to optimally control the trajectories of the actuators.
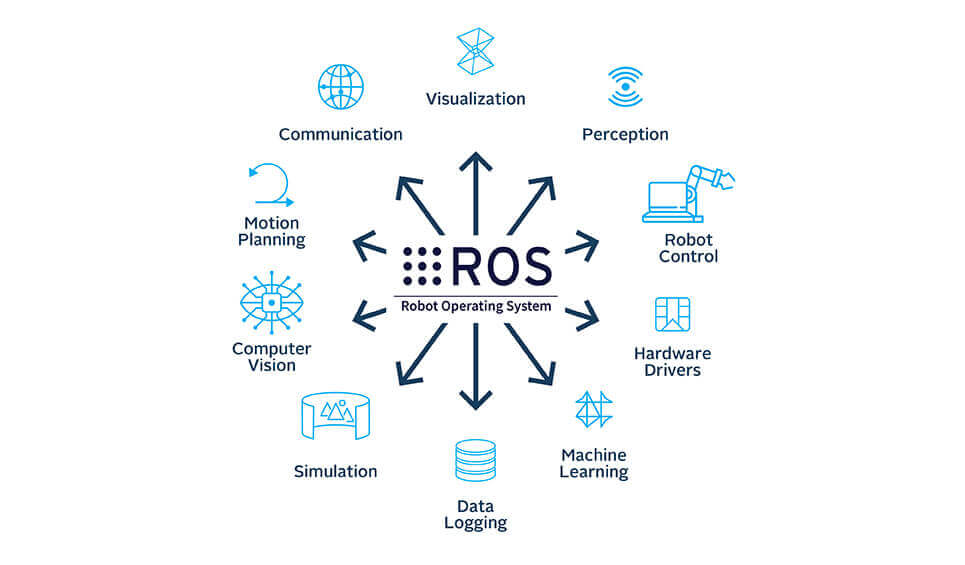
Robot Operating System (ROS)
- ROS is the most popular framework for developing and programming robots.
- Provides utilities as hardware abstraction, low-level device control and package management.
- Different robots can use the same software modules.
- Multilingual: software modules can be written in any language. The most common ones: C++ and Python.
- Peer to peer: distributed architecture consisting of small programs connected with each other and continuously exchanging messages.
- Industry-friendly: started at the University level, but now represents the standard in robotics programming.

Position Control
- Pose control
- Trajectory tracking
- Path planning
- Exteroceptive Sensors: LiDar, Camera and mmWave.
- Model based design
Video
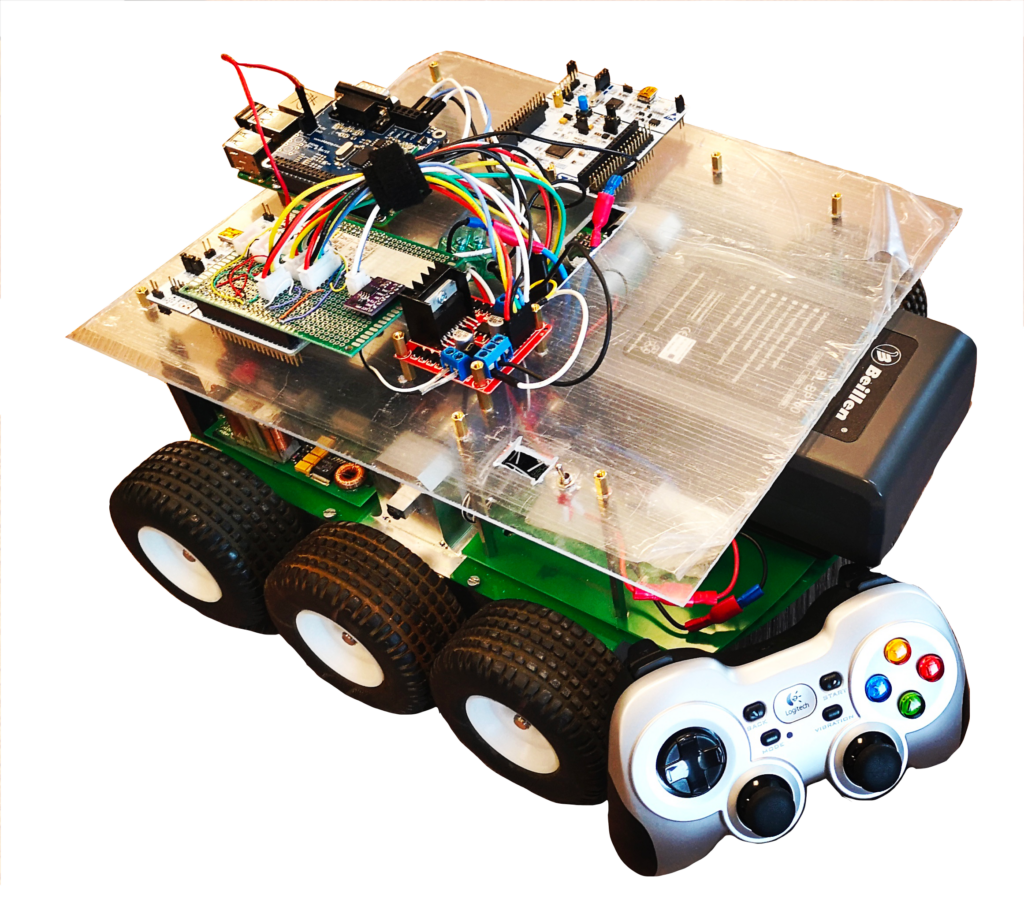
Mobile Autonomous Robot
- Model Predictive Control (MPC) algorithms for autonomous navigation.
- Deep Reinforcement Learning (DRL) and Safe Reinforcement Learning (SRL) algorithms.
- mmWave sensors for environment perception.
Video

Drone
- PX4 flight controllers
- GPS position control.
- Indoor localization with stereo cameras
- Aerial Mapping
- Waypoints mission planning
Video

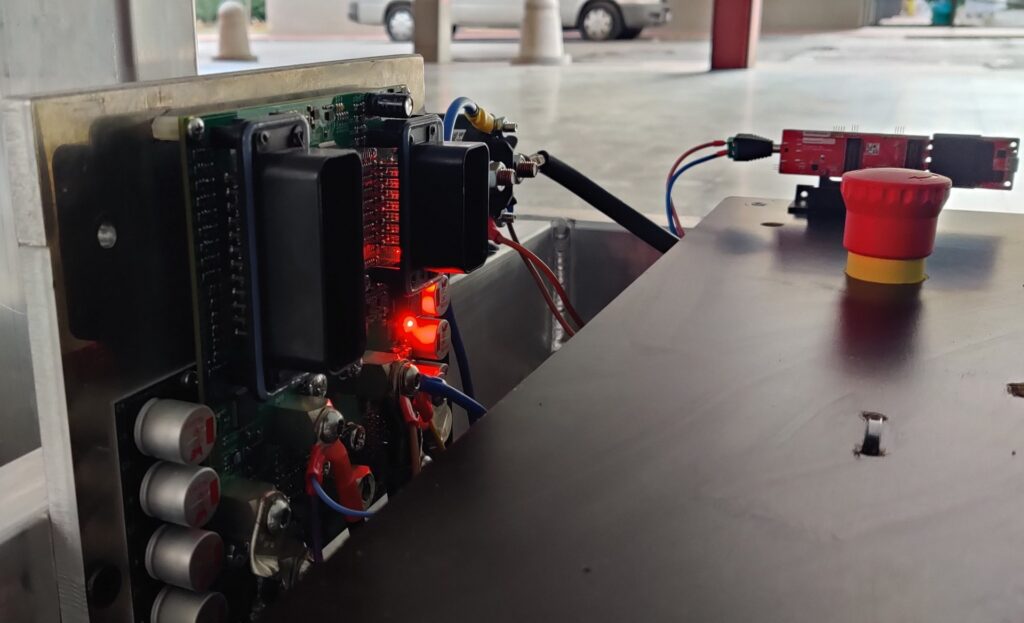
Mobile Platforms
- Velocity Control with safety PID algorithm
- Collision Avoidance with mmWave Sensors
- Safety Bubble Algorithm with mmWave Sensors
- Wall-following with mmWave Sensors
- Standard Industrial Communication Protocols (CAN-BUS , CANFD)
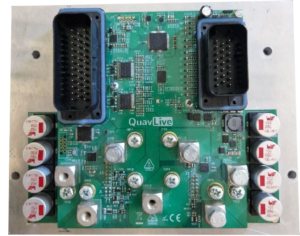
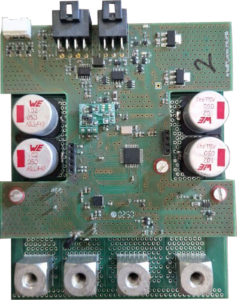
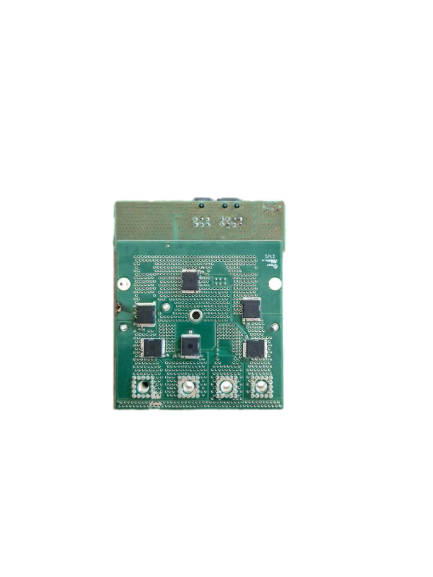
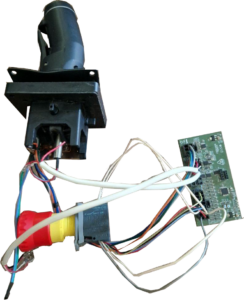
Custom Electronics Boards
- Custom board project and design.
- Consumer electronics and power electronics.
- Microcontroller programming.
- Embedded solutions.
Certifications
- Firmware MISRA compliant.
- Tecnical documentation.
- Statical and dynamical code analisys with certified software.
List of Publications
2023
- Gioacchino Manfredi, Saverio Mascolo, Luca De Cicco and Vito A Racanelli
LSTM-Based Viewport Prediction for Immersive Video Systems
, Ponza, Italy, 13-15 June 2023
- Walter Brescia, Giuseppe Roberto, Vito Racanelli, Saverio Mascolo, Luca De Cicco
Point2Depth: a GAN-based Contrastive Learning Approach for mmWave Point Clouds to Depth Images Transformation
Proc. 31st Mediterranean Conference on Control and Automation (MED2023), Limassol, Cyprus, June 26 – 29, 2023
- Walter Brescia, Antonio Maci, Saverio Mascolo, Luca De Cicco
Safe Reinforcement Learning for Autonomous Navigation of a Driveable Vertical Mast Lift
Proc. 22nd World Congress of the International Federation of Automatic Control, Yokohama, Japan, July 2023
2022
- Walter Brescia, Luca De Cicco, Saverio Mascolo
Sample-Efficient Reinforcement Learning for Pose Regulation of a Mobile Robot
Proc. 11th International Conference on Control, Automation and Information Sciences (ICCAIS 2022), Hanoi, Vietnam, nov. 2022
- Gioacchino Manfredi, Luca De Cicco, Saverio Mascolo
Optimal QoE-fair Resource Allocation in Multi-Path Video Delivery Networks
IEEE Transactions on Network and Service Management, doi:10.1109/TNSM.2022.3162750, in press (PDF)
- Gioacchino Manfredi, Luca De Cicco, Saverio Mascolo
On Asymptotic Stability of Nonlinear Systems with Deep Reinforcement Learning Controllers
30th Mediterranean Conference on Control and Automation, Athens, Greece, June 2022 (PDF)
2021
- Giuseppe Ribezzo, Luca De Cicco, Vittorio Palmisano, Saverio Mascolo
Bitrate Reduction for Omnidirectional Video Streaming: Comparing Variable Quantization Parameter and Variable Resolution Approaches
MedComNet 2021, Virtual Conference, June 2021
- Gioacchino Manfredi, Luca De Cicco, Saverio Mascolo
Synchronizing Live Video Streaming Players Via Consensus
European Control Conference, Virtual Conference, June 2021
2020
- Giuseppe Ribezzo, Luca De Cicco, Vittorio Palmisano, Saverio Mascolo
TAPAS-360°: a Tool for the Design and Experimental Evaluation of 360° Video Streaming Systems
ACM Multimedia (Open Source Competition Track), Seattle, United States, 12-16 October 2020
- G. Ribezzo, L. De Cicco, V. Palmisano, S. Mascolo
A DASH 360° Immersive Video Streaming Control System
Internet Technology Letters, Wiley, itl2.175, doi: 10.1002/itl2.175, May, 2020
- Luca De Cicco, Gioacchino Manfredi, Saverio Mascolo, Vittorio Palmisano
A Multi-Commodity Flow Problem for Fair Resource Allocation in Multi-Path Video Delivery Networks
IFAC World Congress 2020, Berlin, Germany, July 2020 (PDF)
2019
- Luca De Cicco, Gioacchino Manfredi, Saverio Mascolo, and Vittorio Palmisano
QoE-fair Resource Allocation for DASH Video Delivery Systems
Proc. of 1st International Workshop on Fairness, Accountability, and Transparency in MultiMedia (FAT/MM ’19), Nice,, October 25, 2019
- Luca De Cicco, Giuseppe Cilli, Saverio Mascolo
ERUDITE: a Deep Neural Network for Optimal Tuning of Adaptive Video Streaming Controllers
10th ACM Multimedia Systems Conference (ACM MMSys ’19), Amherst, MA, USA, June 18-21, 2019 (PDF) (Slides:PDF)
- L. De Cicco, S. Mascolo, V. Palmisano, G. Ribezzo
Reducing the Network Bandwidth Requirements for 360° Immersive Video Streaming
Internet Technology Letters, Wiley, e118, doi: 10.1002/itl2.118, June, 2019
- Luca De Cicco, Saverio Mascolo, Vittorio Palmisano
QoE-driven Resource Allocation for Massive Video Distribution
Ad Hoc Networks, Elsevier, vol. 89, pp. 170-176, 10.1016/j.adhoc.2019.02.008, 1 June, 2019
2018
- Giuseppe Ribezzo, Luca De Cicco, Vittorio Palmisano, Saverio Mascolo
Reducing Network Bandwidth Requirements for Immersive Video Streaming
Proc. of Balkancom 2018, Podgorica, Montenegro, June 2018
- Giuseppe Ribezzo, Giuseppe Samela, Luca De Cicco, Vittorio Palmisano, Saverio Mascolo
A DASH Video Streaming System for Immersive Contents
Proc. ACM Multimedia Systems Conference (ACM MMSYS) – Demo, Amsterdam, The Netherlands, June 2018
©2007 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works, must be obtained from the IEEE. Disclaimer This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All person copying this information are expected to adhere to the terms and constraints invoked by each author’s copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.